Jingsong Jason Liang
Ph.D. Student at Nanyang Technological University

Jingsong Liang is a first-year PhD student in Robotics and AI at Nanyang Technological University, supervised by Prof. Chen Lv, Prof. Wanhua Li, and Prof. Yoonchang Sung. He is a recipient of the IGP Artificial Intelligence-X Scholarship.
He received his M.S. degree in Computer Science from the School of Computing, National University of Singapore, where he worked as a Research Associate with Prof. Guillaume Sartoretti and Prof. Rodney Teo. He received his B.S. degree in Electrical Engineering from Northeastern University.
His research interests include multimodal and embodied foundation models, deep reinforcement learning, and multi-agent systems.
news
| May 22, 2026 | Invited poster at Singapore Robotics and Intelligent Systems Symposium 2026; Happy to receive the Best Poster Award! 🏆 |
|---|---|
| May 05, 2026 | Our paper on cooperative multi-agent navigation (ORION) has been accepted by RA-L! |
| Jan 31, 2026 | Our paper on graph-based kinodynamic exploration (GRATE) has been accepted by ICRA 2026! |
| Dec 05, 2025 | Happy to serve as invited speaker at Singapore Robotics Research Showcase, IEEE MRS 2025! |
| Nov 06, 2025 | Happy to start my PhD journey at NTU and Glad to receive the prestigious IGP-AI-X Research Award! 🎉 |
| Oct 20, 2025 | Our paper received the best paper award at Active Perception Workshop, IROS 2025 ! 🏆 |
| Oct 06, 2025 | Happy to serve as reviewer for IROS 2025, AAAI 2026, ICLR 2026, and ICRA 2026. |
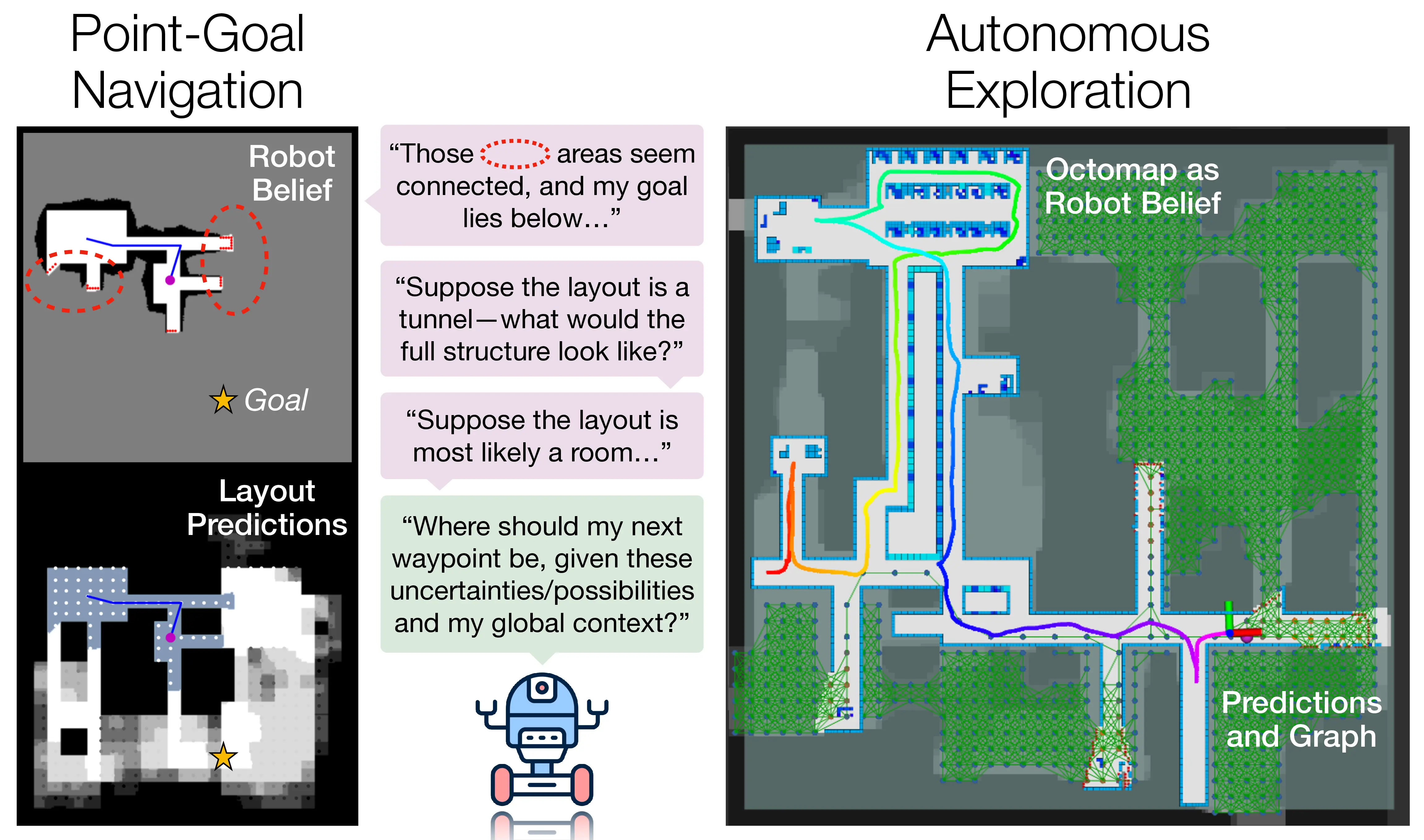
| Aug 02, 2025 | Two papers on (1) inpainting-aware exploration and navigation (CogniPlan) and (2) multimodal GTSP have been accepted by CoRL 2025! See you in Seoul, Korea! |
| Jan 28, 2025 | Our paper on generative-based exploration (DARE) has been accepted by ICRA 2025! See you in Atlanta, USA! |
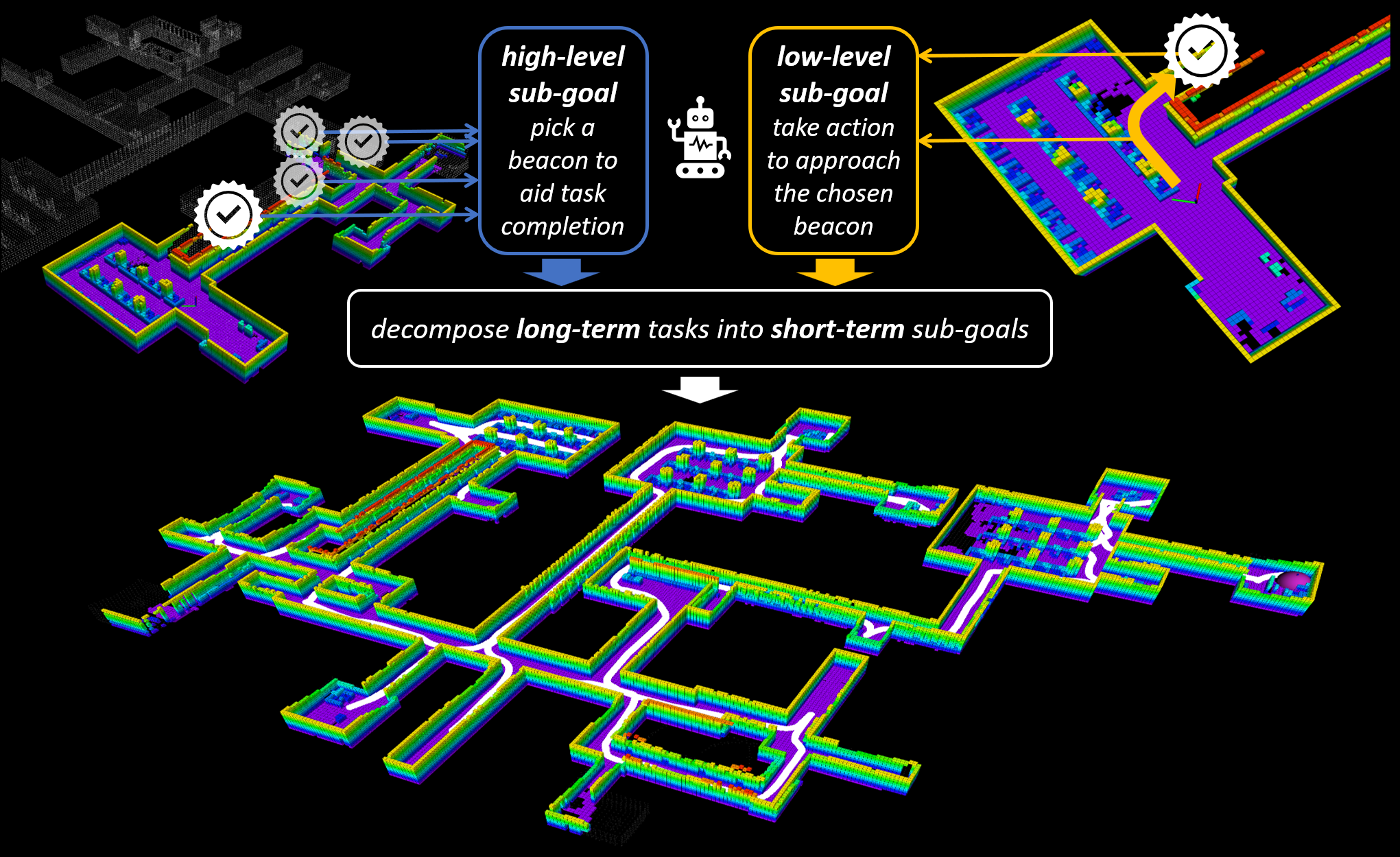
| Nov 05, 2024 | Our paper on hierarchical planning for navigation and exploration (HDPlanner) has been accepted by RA-L! |
| Oct 03, 2024 | Happy to serve as reviewer for IROS 2024, ICLR 2025, and ICRA 2025. |
| Jul 01, 2024 | Our paper on information sharing mechanisms for multi-robot exploration has been accepted for oral presentation by DARS 2024! |
| Jun 30, 2024 | Our paper on multi-robot exploration and rendezvous under limited communication range (IR2) has been accepted for oral presentation by IROS 2024! |
| Apr 22, 2024 | Successful oral defense of “Hierarchical Decision Networks for Distributed Multi-Robot Exploration” for my Master’s degree! Thanks to Prof. Guillaume Sartoretti and Prof. Harold Soh! 🎉 |
| Aug 31, 2023 | Our paper on deep reinforcement learning-based navigation in unknown environments has been accepted by CoRL 2023! See you in Atlanta, USA! |
selected publications
-
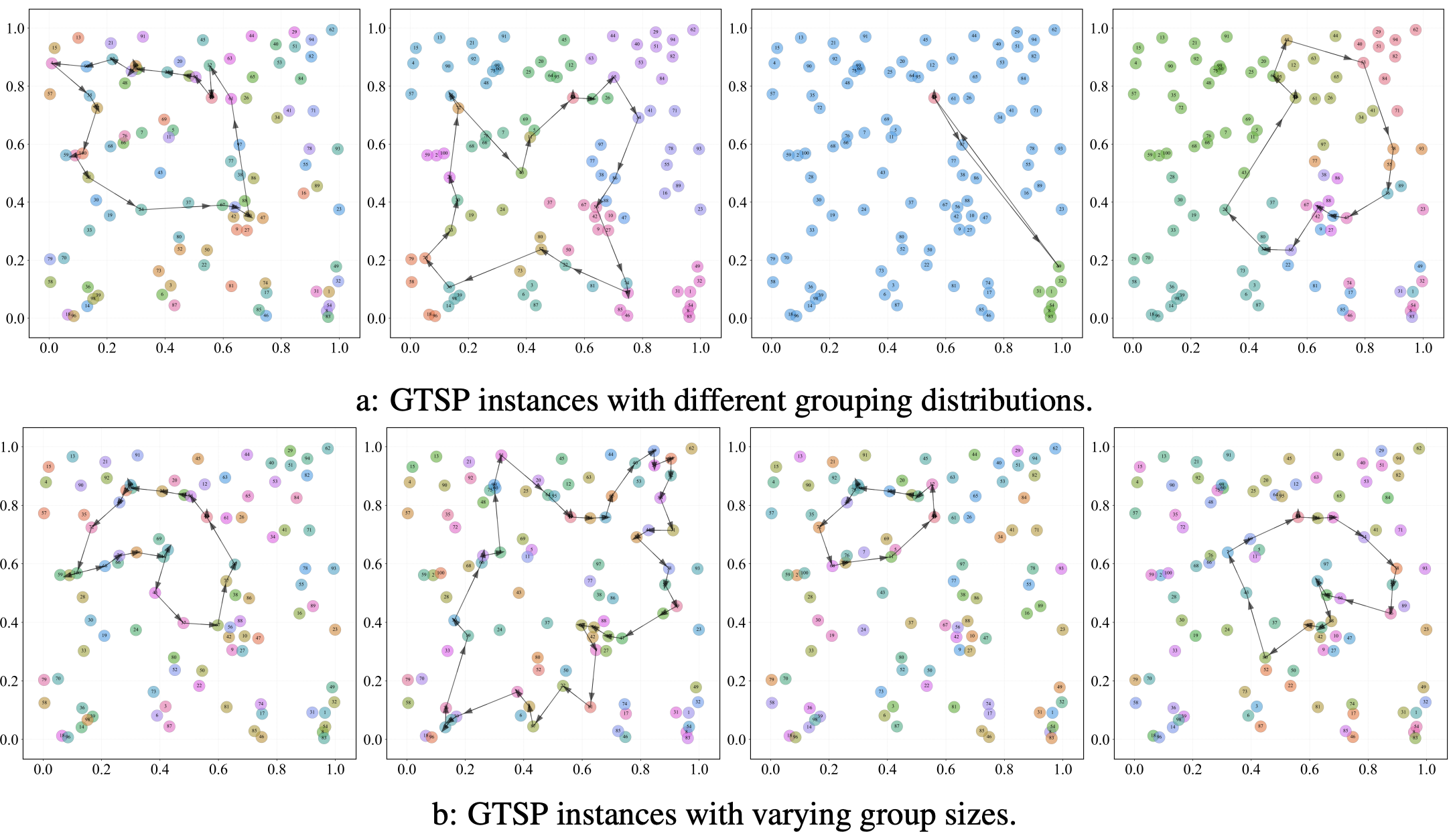 Multimodal Fused Learning for Solving the Generalized Traveling Salesman Problem in Robotic Task PlanningConference on Robot Learning (CoRL), 2025
Multimodal Fused Learning for Solving the Generalized Traveling Salesman Problem in Robotic Task PlanningConference on Robot Learning (CoRL), 2025